The robot is used to operate in narrow pipeline that is difficult for human to get in. Its basic duty includes exploring and finding problems in the pipeline system, and the maintenance of pipeline.
I worked in the team as a mechanical engineer and vice team leader. My duty is to design the mechanical parts and assemblies, build SolidWorks 3D models, and draw engineering drawings with AutoCAD and SolidWorks. Also I was involved in the manufacturing process, which was fully done by ourselves. Testing was also partly conducted by me.
During the research, a prototype model was built and tested, and 2 Chinese national patents and 1 national award were obtained.
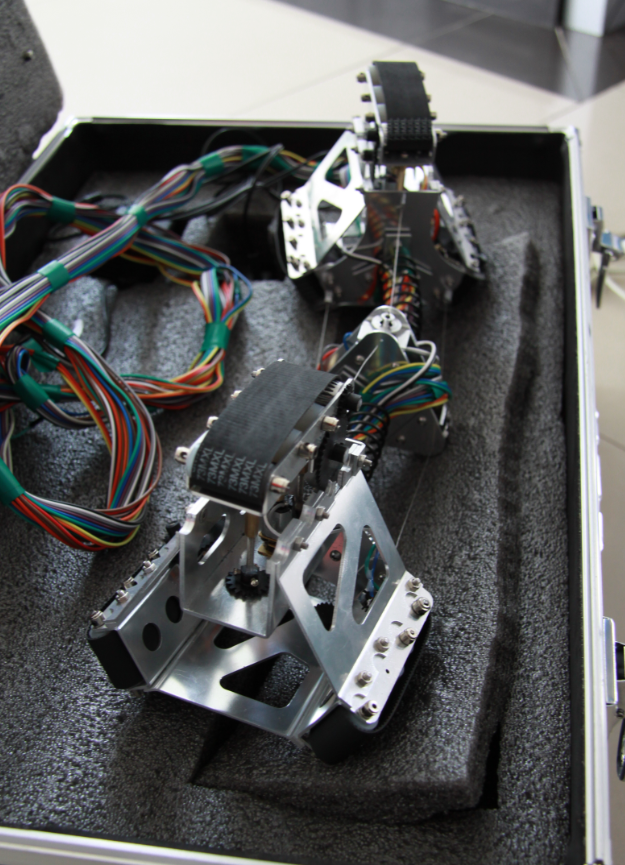
Following is the photo of the prototype and the 3D rendering
I worked in the team as a mechanical engineer and vice team leader. My duty is to design the mechanical parts and assemblies, build SolidWorks 3D models, and draw engineering drawings with AutoCAD and SolidWorks. Also I was involved in the manufacturing process, which was fully done by ourselves. Testing was also partly conducted by me.
During the research, a prototype model was built and tested, and 2 Chinese national patents and 1 national award were obtained.
Following is the photo of the prototype and the 3D rendering


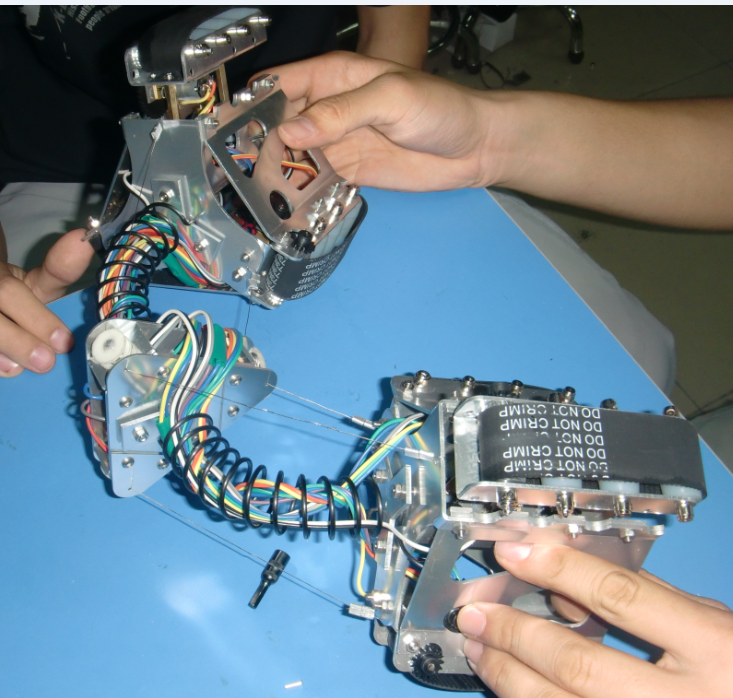
There are 3 ways of moving. The first one is simply using the track. The second way is for vertical pipes. It’s a bionic motion as showing below.

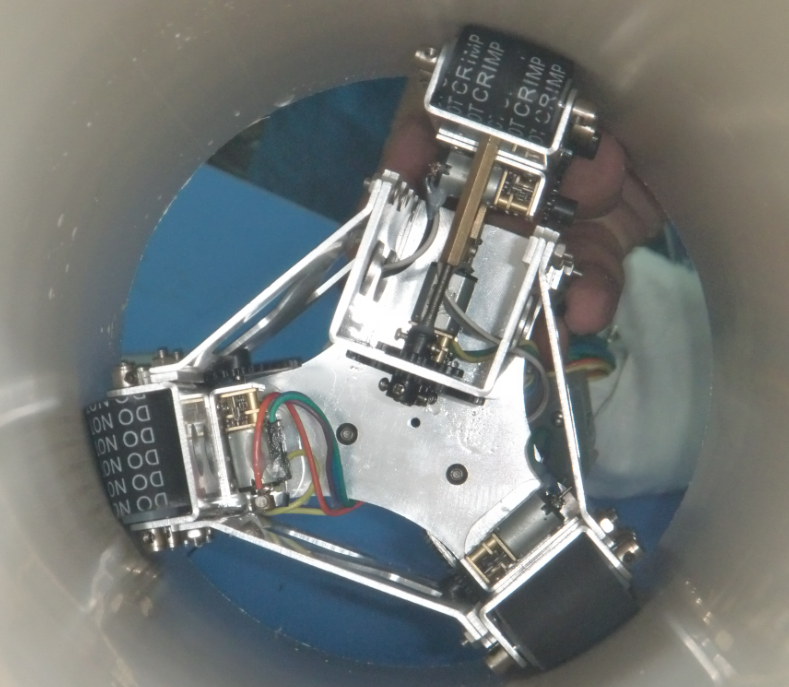
It moves like a caterpillar. 1 of a 3 tracks set can lift relatively to the body so it can hang in vertical pipes as the following picture.

There are 2 kinds of highlighted mechanism.
1, the all side, bionic turning mechanism.
1, the all side, bionic turning mechanism.
|
|
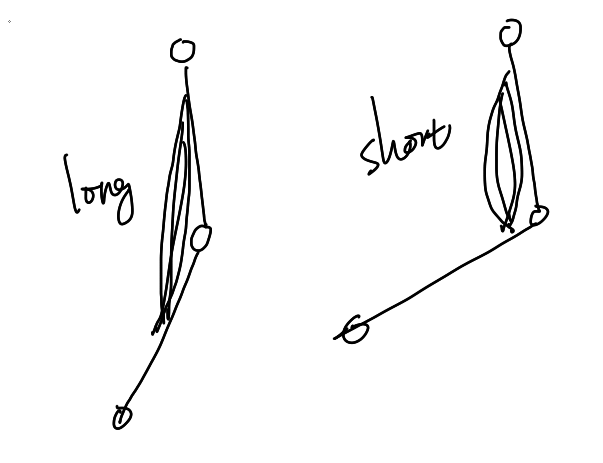
The function of skeletal muscle is as above, when muscle becomes short, a joint is rotated.
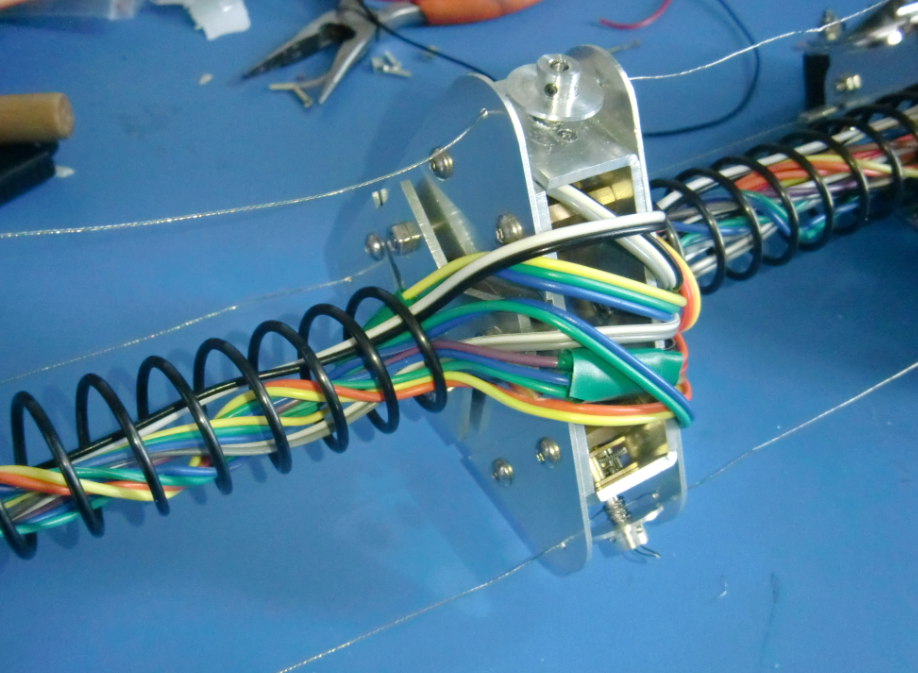
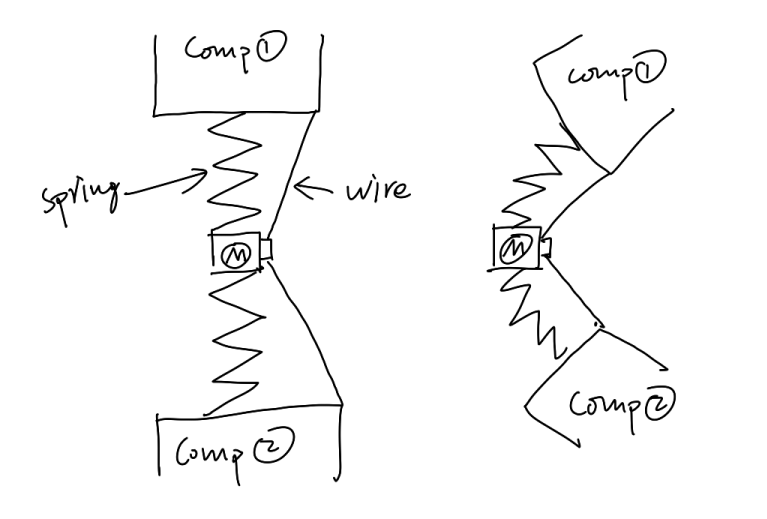
Our mechanism works like this, if direction is chosen, the motor on its side will rotate and roll up the wire to a spool. That is, the wire is shortened. So the spring s bent and the turning of 2 compartments is finished. There are 3 sets of motors and wires, so it can turn to all directions.
2, the lift mechanism.
It can lift the track using a screw.
Our mechanism works like this, if direction is chosen, the motor on its side will rotate and roll up the wire to a spool. That is, the wire is shortened. So the spring s bent and the turning of 2 compartments is finished. There are 3 sets of motors and wires, so it can turn to all directions.
2, the lift mechanism.
It can lift the track using a screw.

More detailed photos of the prototype: