The system was focused on bodybuilding in a single set of device, and was expected to operate as a recovering system that can operate movement orthodontic treatment.
I worked in the team as a mechanical engineer and vice team leader. My duty is to design the mechanical parts and assemblies, 3D modeling, manufacturing, and some testing.
During the research, a 2:1 prototype model was built and tested, and 2 Chinese national patents and 1 national award were obtained.
I worked in the team as a mechanical engineer and vice team leader. My duty is to design the mechanical parts and assemblies, 3D modeling, manufacturing, and some testing.
During the research, a 2:1 prototype model was built and tested, and 2 Chinese national patents and 1 national award were obtained.

|

|
The principal of the system is as following. In traditional bodybuilding, we need a lot of weights and gear to operate. But with an exoskeleton, we can do all movement in the same device. Traditional exoskeleton works to amplify the force and our system provides resistance instead so it can serve as a bodybuilding tool. It also can provide adjustable resistance so it can serve bodybuilders in all situations.
The following is a concept render, in which the device is in its early stage of design.
The following is a concept render, in which the device is in its early stage of design.

Render of Exoskeletal Intelligent Bodybuilding and Recovering System
Some highlighted mechanism of the system:
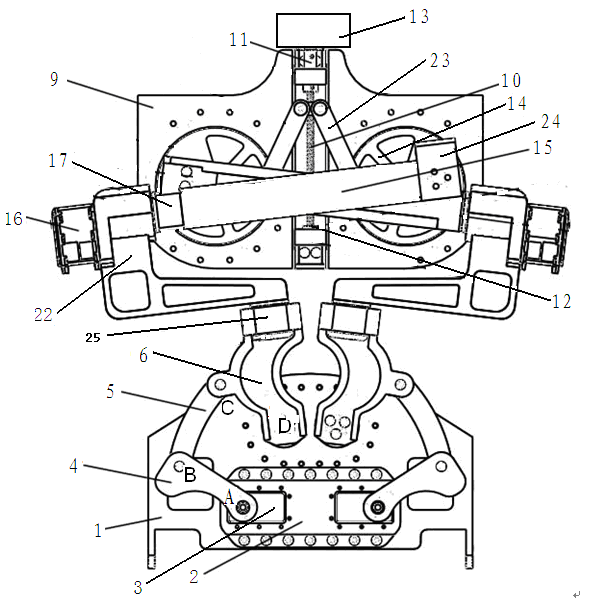
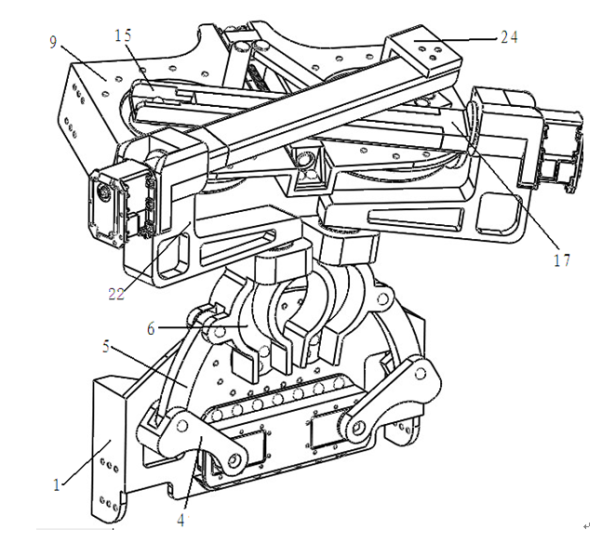
1, the back
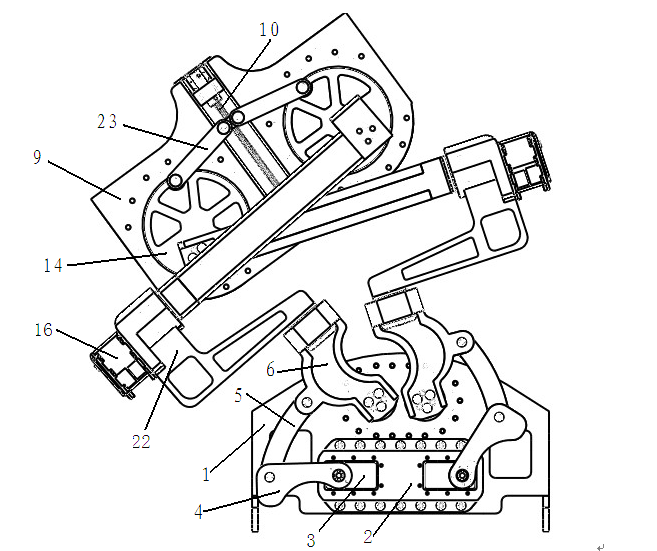
Seldom exoskeleton can move with human back because when people bend over, the mechanism over the back should not only bended but also lengthened. Out mechanism can complete this. There are 2 sets of rails in the back to serve as the extension mechanism.
As shown in the pictures, it can bend in 2 directions and the extension function of the rail can be seen. No3 and no16 are motors.
The 2 big wheels are mechanical to adjust different torso length.
1, the back
Seldom exoskeleton can move with human back because when people bend over, the mechanism over the back should not only bended but also lengthened. Out mechanism can complete this. There are 2 sets of rails in the back to serve as the extension mechanism.
As shown in the pictures, it can bend in 2 directions and the extension function of the rail can be seen. No3 and no16 are motors.
The 2 big wheels are mechanical to adjust different torso length.
|
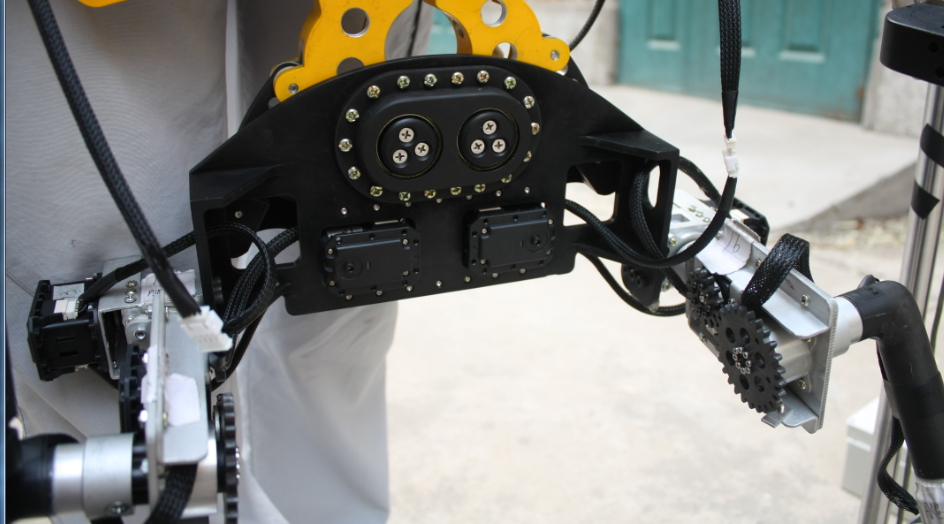
2, the connection of modules
The system features a modular design, which means it can be separated to several main parts and the installation and disassembly of parts are very easy. A shaped constraint and a screw were used, so it can be extremely tough when only 1 screw is applied. This picture is the different kinds of modules. From up to down: upper arm and thigh, shoulder A and ankle, shoulder B and hip. We used Teflon bearings in all rotating parts since it can provide lubrication without getting dirty and oily. 
|

|
Some other important research during the project:
To obtain the data of human body movement, we conducted human motion body capture experiment in Beijing Sport University. Here’s the scene.
To obtain the data of human body movement, we conducted human motion body capture experiment in Beijing Sport University. Here’s the scene.

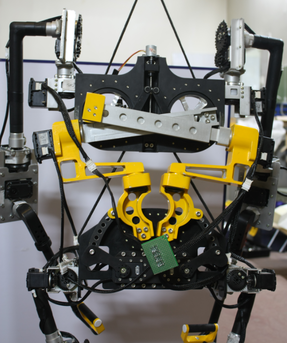
Some detailed picture of the prototype:
The lightweight design of the system can be seen. The ropes were for photographing.
The lightweight design of the system can be seen. The ropes were for photographing.